星图识别1-角距矩阵匹配模型
这篇博客主要是针对2019主要介绍的是第十六届(2019)全国研究生数学建模竞赛(NPMCM)试题B题:天文导航中的星图识别,这里我下载了5篇优秀论文,以及优秀的答辩现场录像,在这篇博客中,我将选取B19102880053提到的基于角距传统算法进行复现。
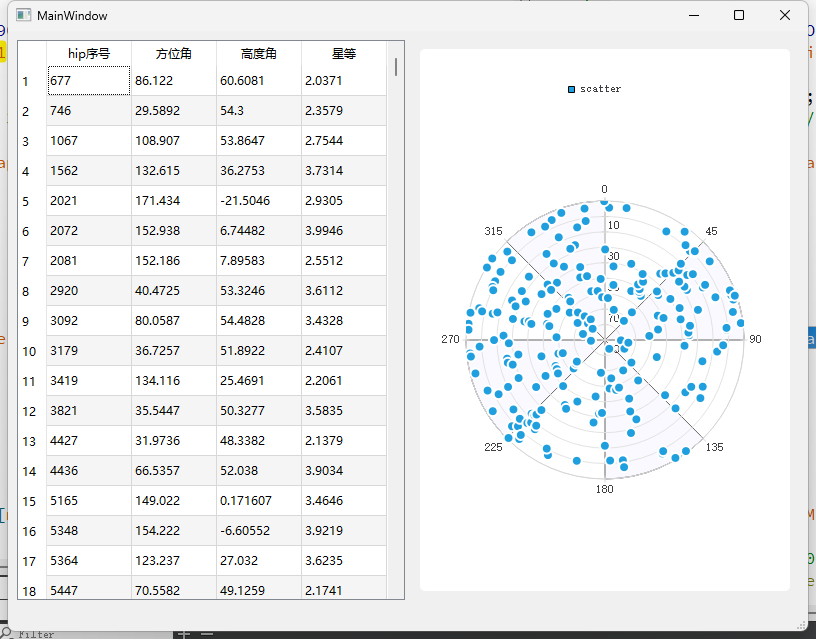
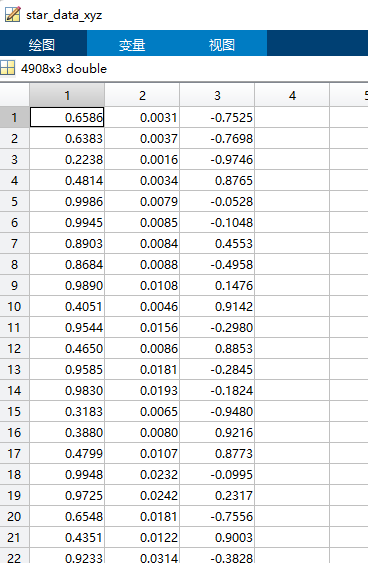
此赛题提供的4908个导航星表数据是.mat文件,因此将使用MATLAB进行代码编写。
1、星表数据处理
首先将星表数据的
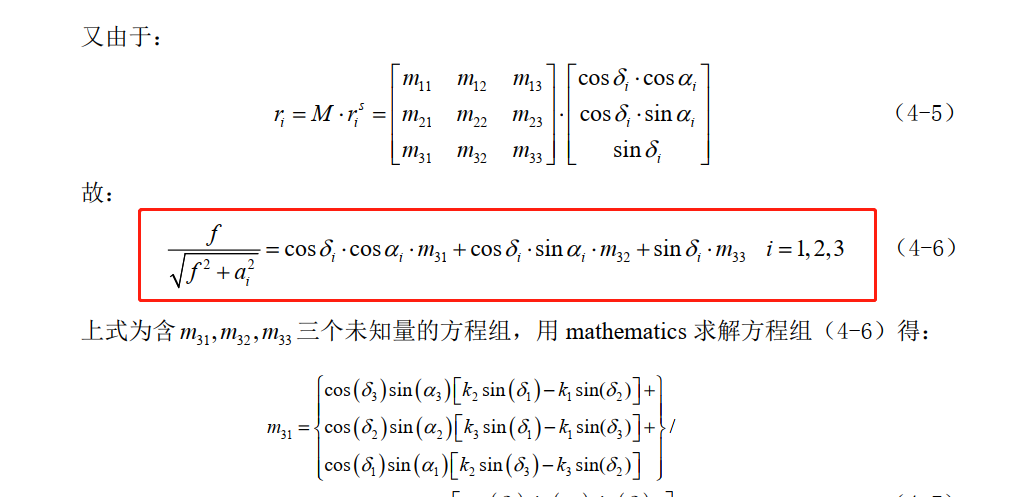
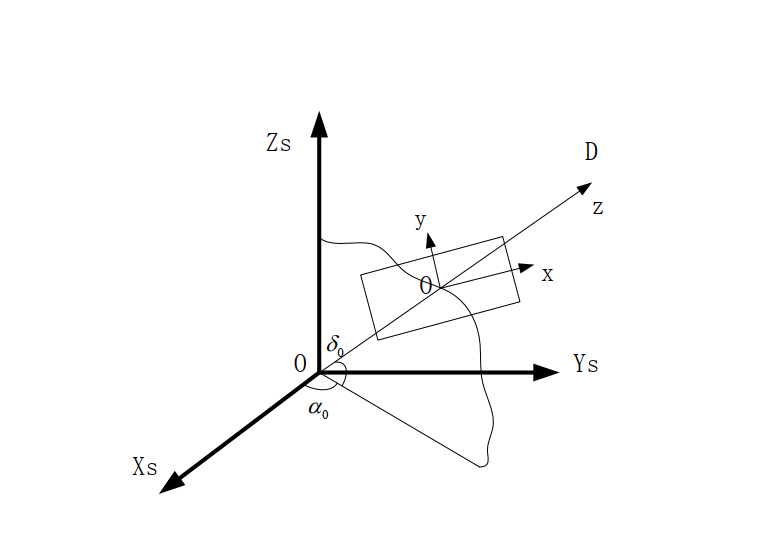
天球坐标系下的赤经、赤纬转为直角坐标系下的x/y/z轴的值,利用公式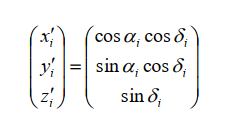
得到
2、准备库矩阵和星图矩阵
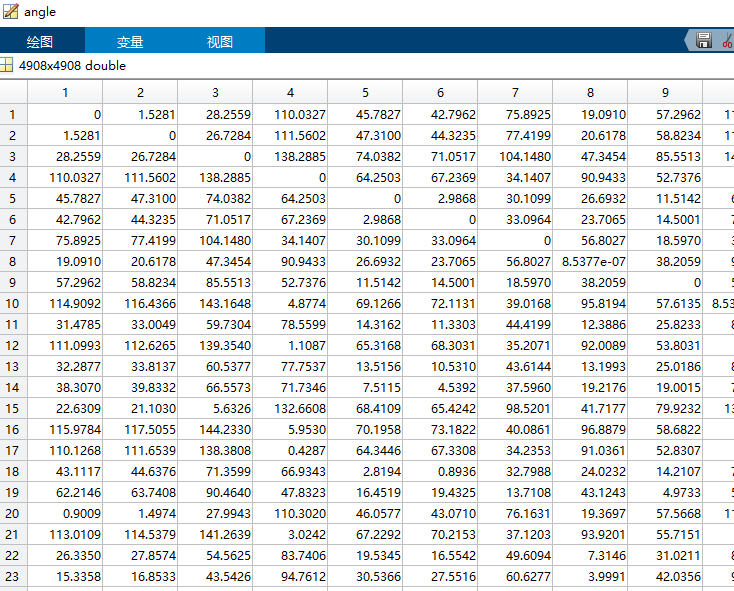
式6-1导航星角距库比较好理解,我将其化成度数,得到:
而式6-2某星图角距矩阵,文中作者提到选取导航星方式,但不妨以任意星,例如表中顺序来求。在此我选取第一个星
A01作为基准星,求解与其他星的角距,但在此我去除了与本身星的角距(因其为0),得到如下角距: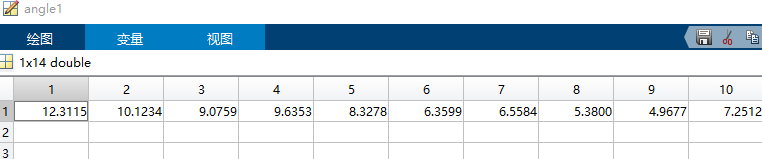
3、算法描述
(其实在此我理解错了,怪不得我运行了这么长时间,先说一下我的理解的算法,是没有优化的算法,在于最后一步还进行遍历循环。)
取
星图角距矩阵第i(i=1)个元素与导航星角距矩阵第j(j=1)列的元素依次匹配,若匹配到角距相等或近似的元素,判断矩阵第i(i=1)个元素数值加 1;main3.m
if ( length(find(abs(angle(:,j)-angle1(i)) < 0.1 ) % 这里的0.1是匹配到角距的判定
panduan(j) = panduan(j)+ 1 ;
end取
星图角距矩阵第i ( i= 2,3,…,n)个元素,重复上一步操作; (该步完成后,若导航星就是第j列,则判断矩阵会加很多个1;)for i = 1:size(angle1,2)
if ( length(find(abs(angle(:,j)-angle1(i))< 0.1 )
panduan(j) = panduan(j)+ 1 ;
end
end若星图矩阵所有元素均完成匹配,则取导航星矩阵第 j ( j = 2,3,…,4908)列元素重复上两步操作;
for j = 1:4908
for i = 1:size(angle1,2)
if ( length(find(abs(angle(:,j)-angle1(i))< 0.1 )
panduan(j) = panduan(j)+ 1 ;
end
end
end取判断矩阵最大元素所在列(记为 x )作为基准星编号 x ;
(关于0.1的设置,假设其为a,我希望采用智能化判断,即当判断矩阵的最大的一个值不大于最大的值的2倍时,差距a减半,继续判断,直到第一个值大于第二个值,即能够明显判断出差异和保证准确性时,判断截止)
for delta=1:10
panduan = zeros(1,4908);
for j = 1:4908
for i = 1:size(angle1,2)
if ( length(find(abs(angle(:,j)-angle1(i))< (2^(-delta)))) )
panduan(j) = panduan(j)+ 1 ;
end
end
end
[max,I ] = maxk(panduan,5)
if( max(1) > max(2)*2 )
newNewMatrix(ii,4)=I(1);
break;
end
end继续匹配导航星矩阵第 x 列,确定星图其他恒星编号 。(其实我的理解的差别在这,作者由基准星的列直接判断其他星,而笨拙的方法是遍历其他基准星,若采用笨拙的方法,星图1将耗时60s,若不遍历,则耗时6s左右,若设定固定0.1差距,则耗时1s左右)
for ii = 1:size(newNewMatrix,1)
angle1 = real(acosd(newNewMatrix(ii,1:3) * newNewMatrix(:,1:3).'));
angle1(find(angle1==0))=[];
for delta=1:10
panduan = zeros(1,4908);
for j = 1:4908
for i = 1:size(angle1,2)
if ( length(find(abs(angle(:,j)-angle1(i))< (2^(-delta)))) )
panduan(j) = panduan(j)+ 1 ;
end
end
end
[max,I ] = maxk(panduan,5)
if( max(1) > max(2)*2 )
newNewMatrix(ii,4)=I(1);
break;
end
end
end
该方法在识别星图1和星图2的时候有较好的效果。但在识别星图3的时候,由于存在的星较少,星之间相距较近 的条件比较苛刻,判断条件需要优化,之前是判断最多的匹配个数大于次多的匹配个数的两倍,现在可能由于delta的缩放比例过大导致无法适应条件进行判断,因此需要修改delta的条件。
对于星图3只能识别出C05
通过对每一个星、每一种delta得出的前几匹配数可见,其实星图3是存在位置误差的,C02、C04、C06、C07存在较大误差。接着对星图4、5验证没问题,对于星图6部分有问题。
接着识别星图7,总结当前代码为:
tic |
对于星图7,识别41个星耗时573秒,判断结果全对。
对于星图8,识别29个星耗时319秒,判断结果全对。
到此为止,我描述了我的 遍历每个星作为基准星的方法,对于星图124578没问题,对于星图36存在找不全的情况。
回到使用基准星的方法来看,使用基准星确实能加速识别过程,例如识别20个星,只需要识别出一个星,再找到对应的矩阵即可。并且使用基准星可以避免找不到星的情况。
如何挑选这个基准星呢? 文中也没给出较好的计算方法。
对于一个基准星来说或许不可靠,能否有一个初步方法筛选出相对可靠的若干基准星? 发现还是一个基准星来的快一些
得到若干基准星后,得到其他星之后是否有一个验证过程? 当选择用一个基准星的时候其实已经进行了一轮验证。
总结上面的实验可得,后续的改进优化需要先快速算出基准星,再由基准星得到其他星,最后进行验证。
基准星一定是相对最可靠的,遍历还是需要遍历,但遍历深度不可太深。
% 来自B19102880053.pdf的角距矩阵匹配模型。 |
星图全遍历91s、找到一组基准星57s,找到一个基准星43s,最快设置delta 2.23s,
在此我将计算每个星图的指向参数。
结果可以参考003.pdf,以下为main4.m的结果,左侧为基准星
星图1结果:2s多
0 1670
0 1477
1502 1502
0 1631
0 1603
0 1453
0 1432
0 1492
0 1488 与053.pdf不同
0 1648
0 1646
0 1566
0 1688
0 1655
0 1505
星图2结果:1s多
0 518
472 472
0 537
0 428
0 491
0 469
0 482
0 503
0 478
0 499
0 547
0 460
0 507
0 556
0 447
0 479
星图3结果:15s多
0 1864
0 1942
0 1825
0 1941
1943 1943 与053.pdf不同 可以确定不需要参考053答案。
0 1900
0 1722
星图4结果:4s 与003.pdf相同
0 3249
0 3346
0 3364
0 3275
0 3421
0 3319
3283 3283
0 3370
0 3265
0 3261
0 3321
0 3309
星图5:5.3s 与003.pdf相同
0 1230
0 1150
0 1017
1033 1033
0 1014
0 1223
0 1008
0 1208
0 1201
星图6: 11s
0 1670
0 1675 003.pdf为1477
0 1502
0 1631
0 1655 003.pdf为1603
0 1692
0 1492
0 1576 003.pdf为1488
1646 1646
0 1566
0 1655
0 1505
星图7:2.1s
1525 1525
0 1572
0 1443
0 1748
0 1780
0 1675
0 1720
0 1503
0 1634
0 1577
0 1757
0 1586
0 1536
0 1610
0 1681
0 1606
0 1670
0 1477
0 1790
0 1502
0 1631
0 1603
0 1415
0 1692
0 1453
0 1432
0 1492
0 1488
0 1648
0 1646
0 1566
0 1688
0 1655
0 1505
0 1373
0 1576
0 1545
0 1424
0 1375
0 1825
0 1401
星图8为1.6s:
1572 1572
0 1387
0 1675
0 1634
0 1586
0 1610
0 1354
0 1681
0 1606
0 1670
0 1390
0 1502
0 1631
0 1603
0 1692
0 1432
0 1488
0 1648
0 1646
0 1566
0 1688
0 1359
0 1505
0 1373
0 1576
0 1424
0 1375
0 1401
0 1385
以main4.m的结果来看,仅星图6有差,后续再验证。